Modifications I made to my Meteor75 Pro Matrix 1S
Modifications I made to my Meteor75 Pro Matrix 1S
Some of the modifications I made to my Betafpv Meteor75 Pro with Matrix 1S flight controller. The quad itself is very nice, but it was a mistake to buy the Betafpv 6-port charger and their batteries. the NTSC camera can not be switched to PAL and gave me troubles with the goggles.
pictures
 |  |
|---|---|
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
modifications
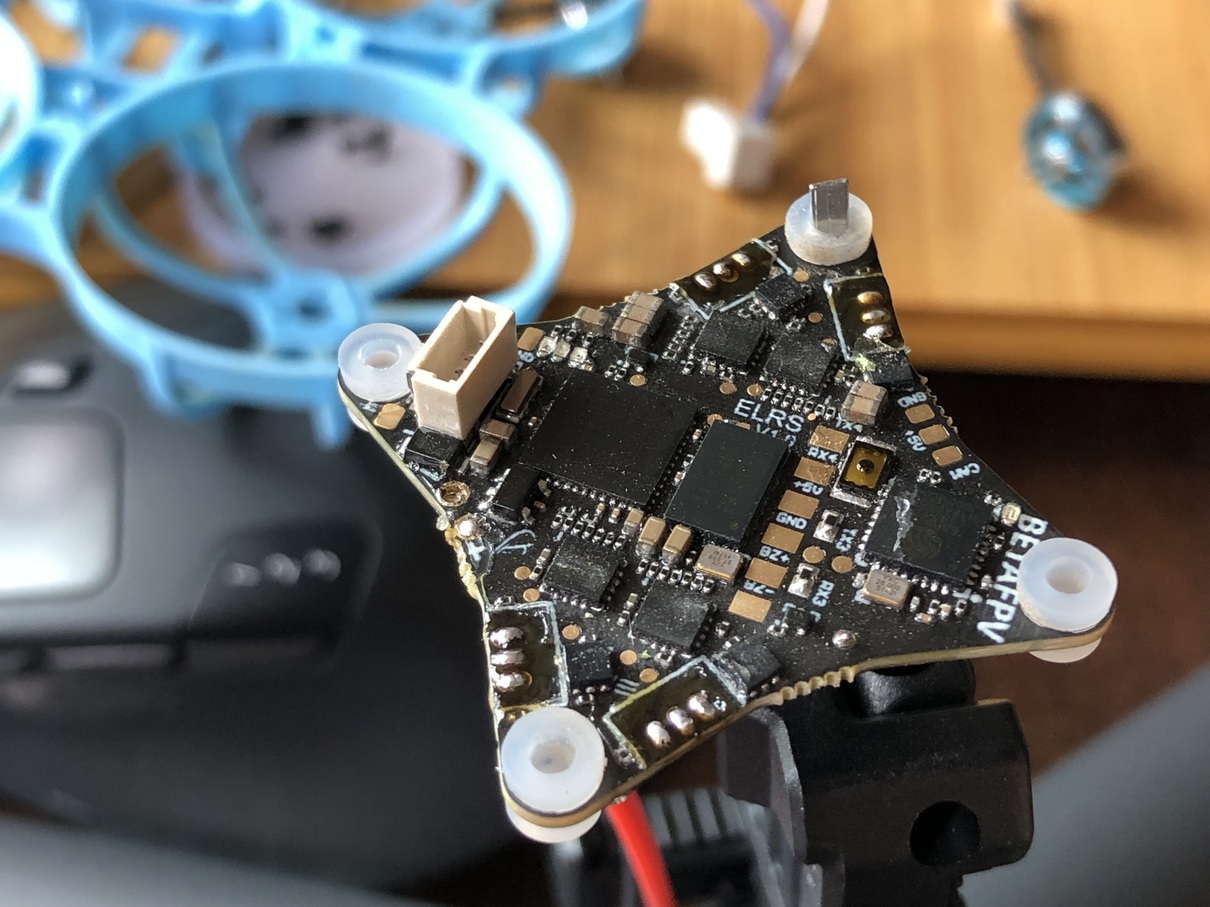
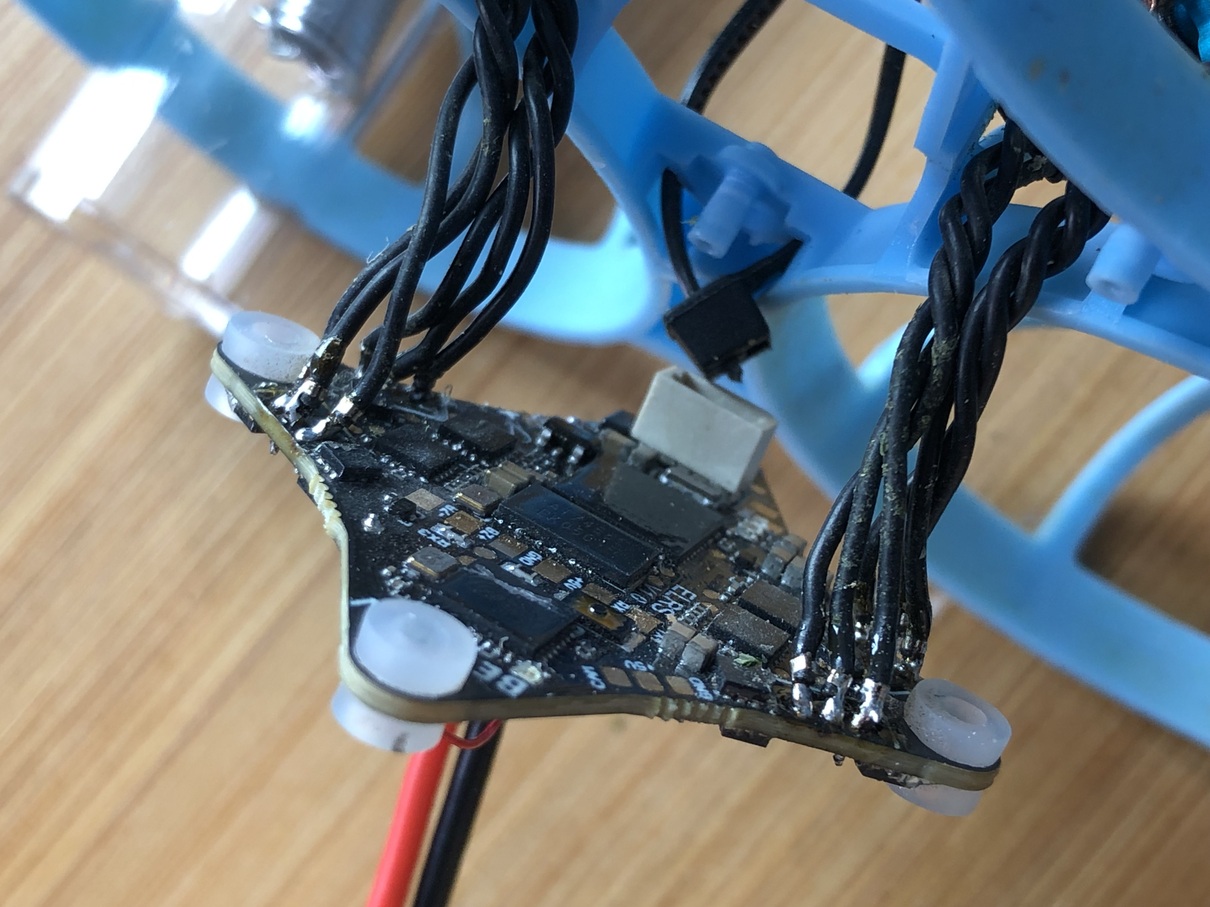
- soldered 20AWG battery leads to the FC
- stopped using Betafpv batteries, they get smelly very fast (it’s unclear if it’s because of charging at 2C or because of the physical damage from crashes). the smell of the electrolyte is very unpleasant and permeates everything
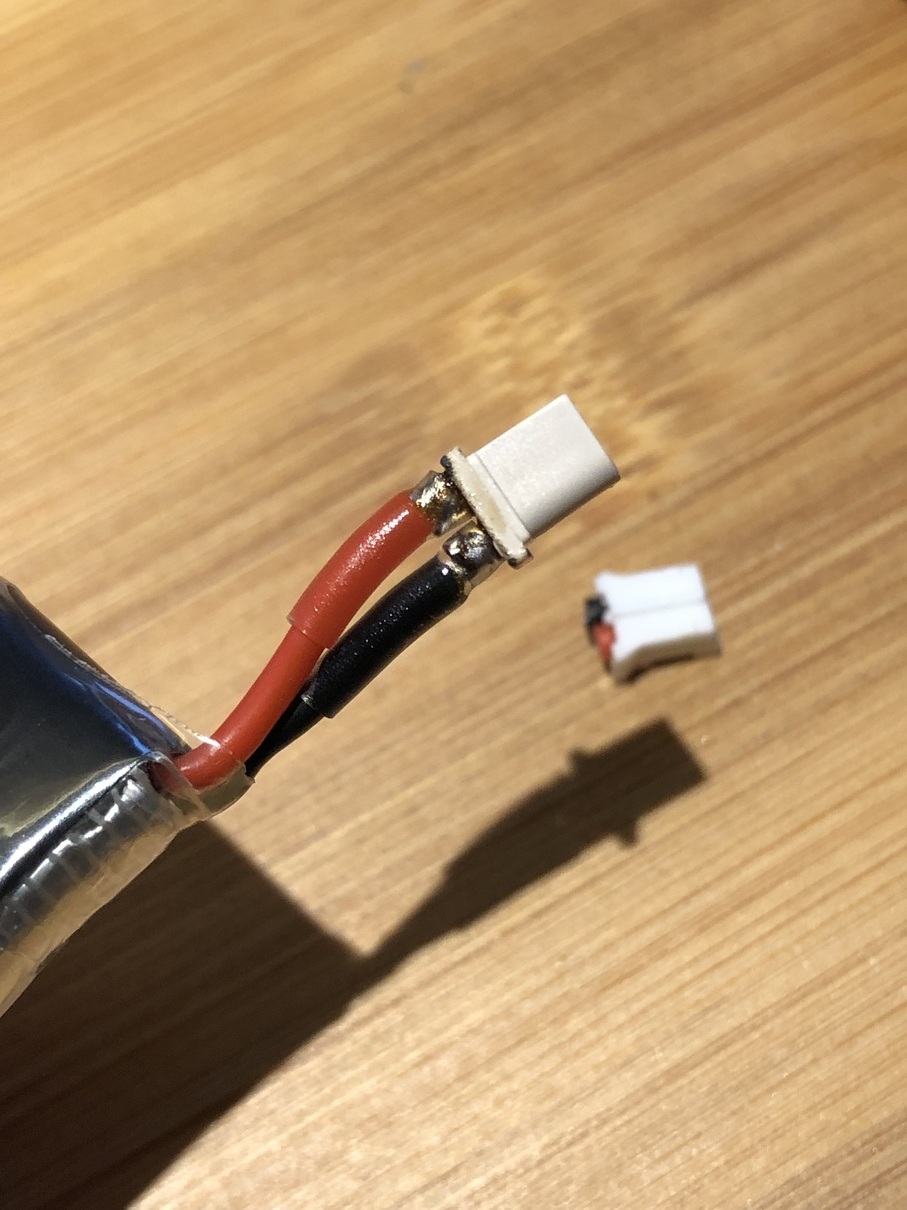
- resoldered BT2.0 connectors to 格氏 550mah 1s PH2.0 batteries (but it’s better to ditch BT2.0 altogether and use GNB A30 connector)
- reflashed with the newest version of Betaflight. the FC is based on STM32G4 chip and uses Betaflight flashing target
BETAFPVG473. because of a bug in Betaflight v.4.5.2, in order to make the FC to communicate with the internal VTX using SmartAudio protocol I had to addNONCOMPLIANT_SMARTAUDIOto the custom defines when building the firmware - stopped using Betafpv charger as it charges at 1A, so even 550mAh batteries get hot (since this current is almost 2C for them). I use 6S serial connected cable and a regular 6S LiPo charger in LiHV mode. if the total number of batteries is more than 6 but is not divisible by 6, there are two approaches (to avoid the charger preventing start of the charge process because of a large delta between the cell voltages):
- charge the first batch up to storage voltage, then swap the remaining batteries in and charge to full voltage, then swap back the remaining batteries and charge them to full voltage as well
- charge in smaller batches, by connecting the batteries consequently starting from #1 on the balance port, shorting the remaining leads to complete the circuit to the positive terminal, and choosing the corresponding number of cells on the charger. for instance, to charge four 1S packs, connect them to #1 through #4, short circuit the terminals within #5 and within #6, and set the charger to 4S LiHV
- turned on the telemetry to be able to use LUA scripts to configure Betaflight from the radio. telemetry tx power is only 10mW
- replaced linearly polarized dipole VTX antenna with a RHCP one. with the same gain as the dipole but coupled with circular polarized antennas on the receiver (I use Speedybee receiver with two RHCP antennas at 90 degree angle) it provides a much more stable picture because there is less interference from multipath reflections.
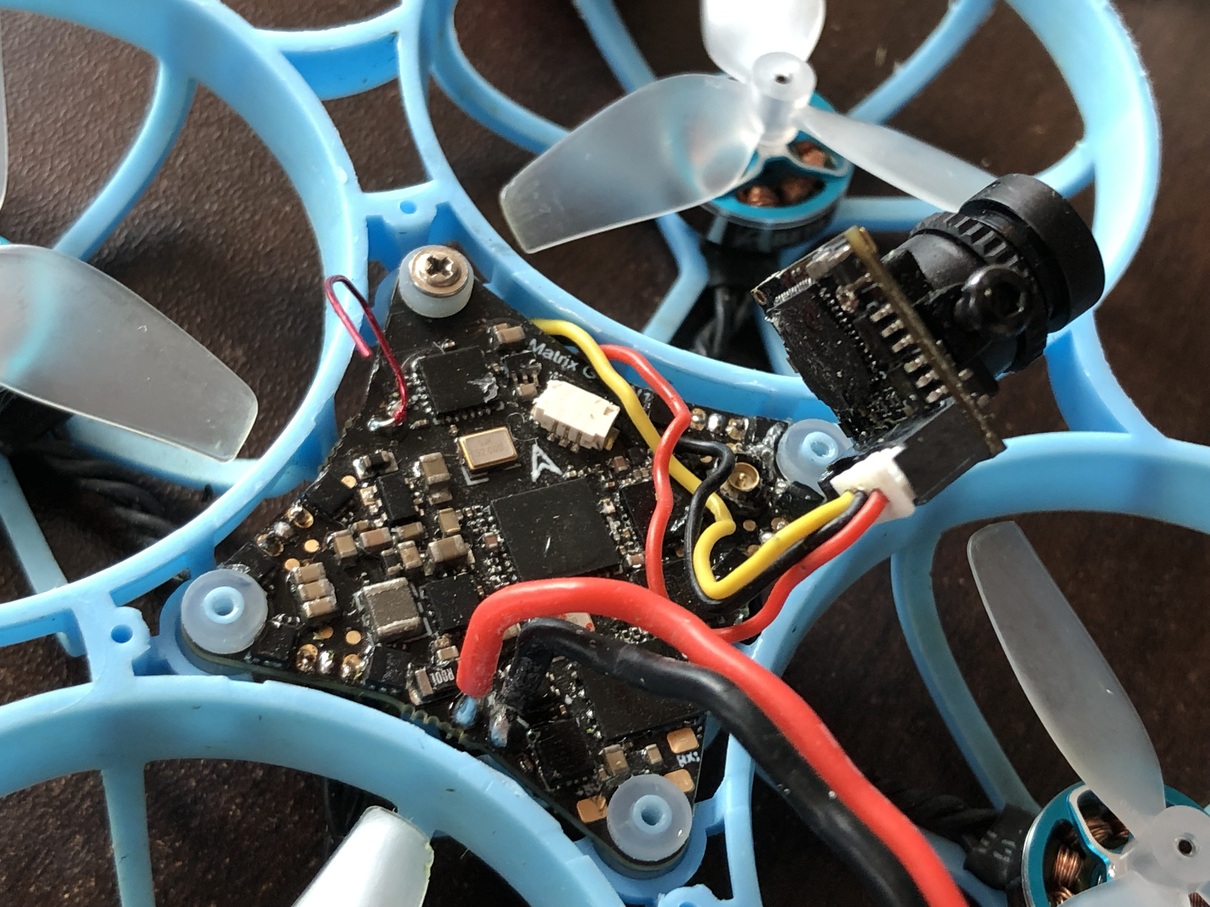
I usedI do not recommend this antenna. The the metal parts of the active element and the ground plane are held together by the coaxial cable itself. Both soldering joints gave up and the whole thing fell apart without me noticing, almost frying my VTX.枫叶 light 1s 2dBi RHCP. - replaced the stock C03 camera with a Caddx Nano Ant camera (the regular one with fast f/1.2 lens, not the lite version) because of some weird compatibility problem with Cobra SD goggles DVR, causing darkened picture (and fluctuating brightness problems) with NTSC signal. also, Caddxfpv camera settings (except the camera orientation) can be adjusted using OSD menu board. I powered the camera from the UART +5v pad, the dedicated 5v camera pad on the FC does not provide enough current for the camera to even start (should’ve measured the voltage, it could be that the pad is actually BAT+ and not 5V). set everything to PAL mode. set the camera AE mode to BLC=3, brightness=35, contrast auto, saturation manual=20.
replaced stock props with HQProp 45mm-3 1.5 shaft. they have a bit more propwash than Betafpv Beta 45mm, but less than the stock ones because of lower pitch angle. also, hqprop are more durable and cheaper.went back to the original Gemfan 45mm-3. biblades do lower the propwash but they provide much less thrust.- started using clamp style prop remover tool with a pusher pin in the middle
- soldered motor wires directly to the flight controller’s PCB, removing the JST-SH connectors. it lowers electrical resistance of the power delivery circuit allowing to draw more current
- replaced the stock canopy with a 3D printed one for walksnail avatar camera. the canopy also presses onto the VTX’s MMXC connector, preventing it from disconnecting during a crash. there is also a canopy version for the stock C03 camera
- used
P-1025to apply a layer of conformal coating to the FC and the camera boards - Li-Po HV voltage limits are a bit different from the regular Li-Po: can be charged up to 4.35v, nominal voltage is 3.8v and can normally be discharged down to 3.4v, with storage voltage in range of 3.8v-3.85v
- some of the key changes to the Betaflight settings:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
set crash_recovery = ON set crash_dthreshold = 80 set crash_gthreshold = 600 set crash_setpoint_threshold = 500 set crash_recovery_rate = 150 set dshot_bidir = ON set motor_pwm_protocol = DSHOT300 set dyn_idle_min_rpm = 75 set vbat_sag_compensation = 100 set thrust_linear = 20 set anti_gravity_gain = 80 set vbat_min_cell_voltage = 320 set vbat_warning_cell_voltage = 340 set vbat_max_cell_voltage = 440 set vbat_full_cell_voltage = 420 set osd_rssi_dbm_alarm = -90 set small_angle = 180 save
- added turtle mode channel to the arm mode with
ORcondition so turtle mode can be engaged without rearming the quad - set VTX to a higher frequency channel further away from the wifi range
- settings for Bluejay firmware ESCs:
- reflashed the ESCs to the newest version of Bluejay firmware, leaving PWM frequency at 96kHz
- moved startup sliders to the max
- set rampup to x3
- set motor timing to 15 degrees
- propwash is a result of propeller blade stall and motor-FC entering a feedback loop.
- it can be amplified by damaged props or bent motor shafts. the shafts can be straightned by hand using a hobby hand drill handle, but only so many times until the metal fatigue sets in. the exact motor(s) with bent shaft can be identified by arming the quad and lowering towards each motor from a level position. the lowest motor will spin up faster. lower towards each motor and compare the vibrations. usually it’s the motors 4 and 2 that take the hit.
- propwash can be reduced by using lower pitch props
- filters must be tuned using blackbox logs to eliminate the propwash
- steel screws can be replaced with titanium ones (M1.4 x 3.5mm)
- filters tuning:
- edgetx ADC Filter OFF, load ELRS profile, set blackbox to record everything at 2khz, assign blackbox to a switch
1 2 3 4 5 6 7
set debug_mode = GYRO_SCALED set blackbox_mode = NORMAL set blackbox_sample_rate = 1/2 set blackbox_disable_debug = OFF set blackbox_disable_gyro = OFF set blackbox_disable_gyrounfilt = OFF save
- do several slow punchouts avoiding propwash
- use blackbox explorer to view the log and adjust filters in accordance with
frequency vs throttlegraph for gyro unfiltered
- edgetx ADC Filter OFF, load ELRS profile, set blackbox to record everything at 2khz, assign blackbox to a switch
references
- https://www.youtube.com/@butterflyfpv
- https://www.youtube.com/@JoshuaBardwell
- https://www.youtube.com/@fractalengineering
- https://www.youtube.com/@ChrisRosser
- https://oscarliang.com/best-tinywhoop-settings/
This post is licensed under CC BY 4.0 by the author.